Implement actions as Behavior Trees
Overview
Behavior Trees are a great way to implement actions. Instead of implementing an action, we specify an xml file with the structure of a behavior Tree and implement the tree nodes. This allows you to easily modify the implementation of an action, and reuse the nodes that are part of it in different behavior trees.
In PlanSys2 we will use the BehaviorTree.CPP package from Davide Faconti. Read the tutorials there to learn more control nodes and so more sophisticated actions.
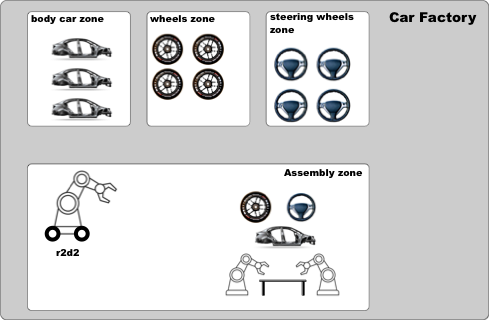
In this tutorial we are going to see an example of a car assembly factory. The robots in this factory must transport the parts of a car from the areas where they are stored to the assembly area, in order to assemble a car.
You can find the PDDL domain of this tutorial in this file.
Tutorial Steps
0- Requisites
If you haven’t done yet, clone in your workspace and build the PlanSys2 examples
cd <your_workspace> git clone -b <ros2-distro>-devel https://github.com/PlanSys2/ros2_planning_system_examples.git src colcon build --symlink-install rosdep install --from-paths src --ignore-src -r -y colcon build --symlink-install
1- Running the example
Open a new terminal and run PlanSys2:
ros2 launch plansys2_bt_example plansys2_bt_example_launch.py
You have two options: you can use the real Nav2 package with a simulation or using a Nav2 fake node:
ros2 launch nav2_bringup tb3_simulation_launch.py # For real Nav2 and Simulation ros2 run plansys2_bt_example nav2_sim_node # For fake Nav2 node
Open a new terminal and run the PlanSys2 terminal:
ros2 run plansys2_terminal plansys2_terminal
In the PlanSys2 terminal shell, copy and paste the next commands to init the knowledge of the system and set the goal:
set instance r2d2 robot set instance wheels_zone zone set instance steering_wheels_zone zone set instance body_car_zone zone set instance assembly_zone zone set instance recharge_zone zone set instance wheel_1 piece set instance body_car_1 piece set instance steering_wheel_1 piece set instance wheel_2 piece set instance body_car_2 piece set instance steering_wheel_2 piece set instance wheel_3 piece set instance body_car_3 piece set instance steering_wheel_3 piece set instance car_1 car set instance car_2 car set instance car_3 car set predicate (robot_available r2d2) set predicate (robot_at r2d2 wheels_zone) set predicate (is_assembly_zone assembly_zone) set predicate (is_recharge_zone recharge_zone) set predicate (piece_at wheel_1 wheels_zone) set predicate (piece_at body_car_1 body_car_zone) set predicate (piece_at steering_wheel_1 steering_wheels_zone) set predicate (piece_is_wheel wheel_1) set predicate (piece_is_body_car body_car_1) set predicate (piece_is_steering_wheel steering_wheel_1) set predicate (piece_not_used wheel_1) set predicate (piece_not_used body_car_1) set predicate (piece_not_used steering_wheel_1) set goal (and(car_assembled car_1)) run
Alternatively, you can also copy the commands into a text file (e.g. commands.txt) and enter the following line in the PlanSys2 terminal:
source commands.txt
2- Using Behavior Trees
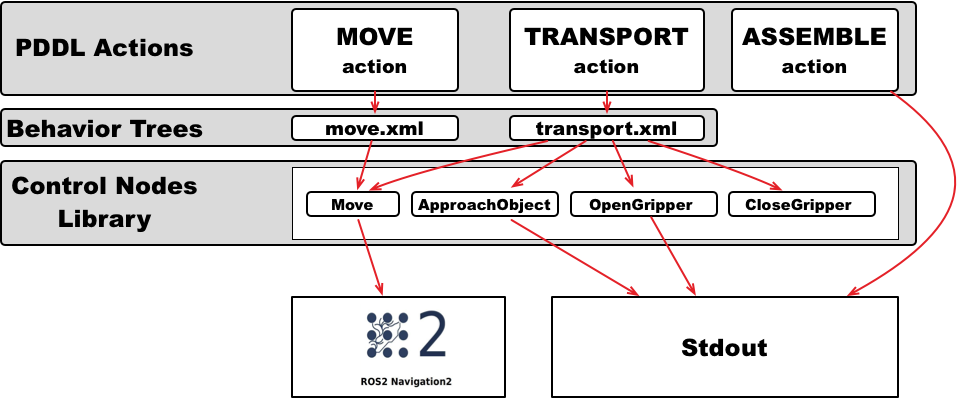
In the PDDL domain we have three actions: assemble, move and transport. We will implement the assemble action without using BTs, as we have done in the previous tutorials.
We will implement the other two PDDL actions, Move and Transport, using BTs. For this, each action will have a BT encoded in an XML file. This XML file contains
the control structures (sequences, fallbacks, …) and the nodes that carry out the action. In this tutorial, 4 BT nodes have been implemented (Move, ApproachObject,
OpenGripper, and CloseGripper) that can be included in the BTs of the PDDL actions.
In PlanSys2 there is a generic executable that any BT can run. This executable is bt_action_node from the package `` plansys2_bt_actions``. To use it, we should add it in
the launch file, specifying as parameter the XML file that contains the BT and the PDDL action name:
move_cmd = Node( package='plansys2_bt_actions', executable='bt_action_node', name='move', namespace=namespace, output='screen', parameters=[ example_dir + '/config/params.yaml', { 'action_name': 'move', 'bt_xml_file': example_dir + '/behavior_trees_xml/move.xml' } ])
The params.yaml contains the BT nodes that will be used in the BT. As we implement each BT as plugins, it is necessary to specify each custom node used. We can also include
any parameter needed by the specific BT node. In this case, the coordinates of each room is specified to the BT node move using parameters:
move: ros__parameters: plugins: - plansys2_move_bt_node waypoints: ["wheels_zone", "steering_wheels_zone", "body_car_zone", "assembly_zone"] waypoint_coords: wheels_zone: [0.0, -2.0, 0.0] steering_wheels_zone: [1.8, 0.0, 0.0] body_car_zone: [0.0, 2.0, 0.0] assembly_zone: [-2.0, -0.4, 0.0]
2.1 PDDL Action move
This is the BT for the move action. The sequence is not necessary, but it is maintained in the tutorial to be coherent with the available code.
It is composed only by one BT node Move (do not confuse with PDDL action move).
<root BTCPP_format="4" main_tree_to_execute = "MainTree" > <BehaviorTree ID="MainTree"> <Sequence name="root_sequence"> <Move name="move" goal="{arg2}"/> </Sequence> </BehaviorTree> </root>
In PlanSys2, the arguments of the PDDL action are accessible in the XML through values in the blackboard whose identifiers are arg0, arg1, arg2, and so on. If executing the
PDDL action (move r2d2 corridor kitchen), arg2 is the destiny room kitchen.
2.2 PDDL Action transport
This is the BT for the transport action. It is implemented as a sequence of BT nodes, including reuse the BT node Move.
<root BTCPP_format="4" main_tree_to_execute = "MainTree" > <BehaviorTree ID="MainTree"> <Sequence name="root_sequence"> <OpenGripper name="open_gripper"/> <ApproachObject name="approach_object"/> <CloseGripper name="close_gripper"/> <Move name="move" goal="{arg3}"/> <OpenGripper name="open_gripper"/> </Sequence> </BehaviorTree> </root>
2.3 BT Nodes
We implemented 4 BT nodes for this tutorial. ApproachObject, OpenGripper, and CloseGripper have a similar implementation, showing only a message in the terminal when executing:
class ApproachObject : public BT::ActionNodeBase { public: explicit ApproachObject( const std::string & xml_tag_name, const BT::NodeConfiguration & conf); void halt(); BT::NodeStatus tick(); static BT::PortsList providedPorts() { return BT::PortsList({}); } private: int counter_; };ApproachObject::ApproachObject( const std::string & xml_tag_name, const BT::NodeConfiguration & conf) : BT::ActionNodeBase(xml_tag_name, conf), counter_(0) { } void ApproachObject::halt() { std::cout << "ApproachObject halt" << std::endl; } BT::NodeStatus ApproachObject::tick() { std::cout << "ApproachObject tick " << counter_ << std::endl; if (counter_++ < 5) { return BT::NodeStatus::RUNNING; } else { counter_ = 0; return BT::NodeStatus::SUCCESS; } } } // namespace plansys2_bt_example #include "behaviortree_cpp/bt_factory.h" BT_REGISTER_NODES(factory) { factory.registerNodeType<plansys2_bt_example::ApproachObject>("ApproachObject"); }
For implementing the BT node Move, we make it to inherit from BtActionNode<> to simplify the implementation when the node calls a ROS2 action. In this case, nav2_msgs::action::NavigateToPose.
class Move : public plansys2::BtActionNode<nav2_msgs::action::NavigateToPose> { public: explicit Move( const std::string & xml_tag_name, const std::string & action_name, const BT::NodeConfiguration & conf); BT::NodeStatus on_tick() override; BT::NodeStatus on_success() override; static BT::PortsList providedPorts() { return { BT::InputPort<std::string>("goal") }; } private: int goal_reached_; std::map<std::string, geometry_msgs::msg::Pose2D> waypoints_; };
BtActionNode<> hides all the complexity, and only it is necessary to implement the method on_tick, called each time the BT node is ticked. In this BT node, we get the destination id from
the input goal parameter. Remember the line in the XML <Move name="move" goal="{arg3}"/>.
BT::NodeStatus Move::on_tick() { if (status() == BT::NodeStatus::IDLE) { rclcpp::Node::SharedPtr node; config().blackboard->get("node", node); std::string goal; getInput<std::string>("goal", goal); geometry_msgs::msg::Pose2D pose2nav; if (waypoints_.find(goal) != waypoints_.end()) { pose2nav = waypoints_[goal]; } else { std::cerr << "No coordinate for waypoint [" << goal << "]" << std::endl; } geometry_msgs::msg::PoseStamped goal_pos; goal_pos.header.frame_id = "map"; goal_pos.header.stamp = node->now(); goal_pos.pose.position.x = pose2nav.x; goal_pos.pose.position.y = pose2nav.y; goal_pos.pose.position.z = 0; goal_pos.pose.orientation = tf2::toMsg(tf2::Quaternion({0.0, 0.0, 1.0}, pose2nav.theta)); goal_.pose = goal_pos; } return BT::NodeStatus::RUNNING; }
There are also more methods that we can implement if needed (on_success, on_aborted, on_cancelled, and so on).